Outdated documentation
The latest documentation was moved to docs.qfield.org
GNSS and precision measurement
QField can make use of the internal GNSS (Global Navigation Satellite System, like GPS, GLONASS, Galileo or Beidou).
QField can also connect to external antennas through bluetooth and directly integrate their NMEA stream.
Quality indication
Additional variables
You can get access to positioning information through additional expression variables.
These will only be available when positioning is enabled.
These variables are commonly used as default values for fields to keep track of the quality of
individual measured points.
- @position_source_name
- The name of the device that gave location information as reported by the sensor. To differenciate between internal and external sensor. If the position is manually set, and the position is not snapped to the cursor, the source name is “manual”. In case the cursor is not snapped to the position, all other variables will be null, if you need this, use the ``gnss_`` variables instead.
- @position_quality_description
- A human readable and translated string for the quality as reported by the sensor. E.g. “Fixed RTK”. It is only available when the crosshair is snapped to the sensor.
- E
- IE
- @position_coordinate
- A point with the coordinate in WGS84. Lon, Lat, Altitude as delivered by the sensor. It is only available when the crosshair is snapped to the sensor.
- x(@position_coordinate)
- IE
- @position_horizontal_accuracy
- The horizontal accuracy of the coordinate (in meters) as reported by the sensor. It is only available when the crosshair is snapped to the sensor.
- IE
- @position_timestamp
- The timestamp of the position in UTC as reported by the sensor. It is only available when the crosshair is snapped to the sensor.
- IE
- @position_direction
- The direction of movement in degrees from true north as reported by the sensor. It is only available when the crosshair is snapped to the sensor.
- IE
- @position_ground_speed
- Groundspeed (in m/s) as reported by the sensor. It is only available when the crosshair is snapped to the sensor.
- IE
- @position_magnetic_variation
- The angle between the horizontal component of the magnetic field and true north, in degrees as reported by the sensor. Also known as magnetic declination. A positive value indicates a clockwise direction from true north and a negative value indicates a counter-clockwise direction. It is only available when the crosshair is snapped to the sensor.
- IE
- @position_vertical_accuracy
- The vertical accuracy of the coordinate (in meters) as reported by the sensor. It is only available when the crosshair is snapped to the sensor.
- IE
- @position_3d_accuracy
- The 3 dimensional accuracy of the coordinate (in meters), 3D-RMS as reported by the sensor. It is only available when the crosshair is snapped to the sensor.
- IE
- @position_vertical_speed
- The vertical speed (in m/s) as reported by the sensor. It is only available when the crosshair is snapped to the sensor.
- IE
- @position_pdop
- Position dilution of precision as reported by the sensor. It is only available when the crosshair is snapped to the sensor.
- E
- @position_hdop
- Horizontal dilution of precision as reported by the sensor. It is only available when the crosshair is snapped to the sensor.
- E
- @position_vdop
- Vertical dilution of precision as reported by the sensor. It is only available when the crosshair is snapped to the sensor.
- E
- @position_number_of_used_satellites
- Number of satellites as reported by the sensor. It is only available when the crosshair is snapped to the sensor.
- E
- @position_used_satellites
- A list of satellites in use (pri) as reported by the sensor. It is only available when the crosshair is snapped to the sensor.
- array_count(@position_used_satellites)
- E
- @position_fix_status_description
- The GPS Fix Status “NoData”, “NoFix”, “Fix2D” or “Fix3D” as reported by the sensor. It is only available when the crosshair is snapped to the sensor.
- E
- @position_fix_mode
- Fix mode (where ‘M’ = Manual, forced to operate in 2D or 3D or ‘A’ = Automatic, 3D/2D) as reported by the sensor. It is only available when the crosshair is snapped to the sensor.
- E
All @position_* variables have a corresponding @gnss_* variable. The gnss variables always report the gnss sensor values, even when the crosshair is not snapped.
- Voorbeelden:
- when the crosshair is snapped to the sensor
- @gnss_horizontal_accuracy –> The horizontal accuracy of the coordinate (in meters) as reported by the sensor.
- @position_horizontal_accuracy –> The horizontal accuracy of the coordinate (in meters) as reported by the sensor.
- @position_source_name –> sensor name.
- when the crosshair is manually moved
- @gnss_horizontal_accuracy –> The horizontal accuracy of the coordinate (in meters) as reported by the sensor.
- @position_horizontal_accuracy –> The value is NULL.
- @position_source_name –> The value is manual.
I: Internal position source
E: External (NMEA) position source
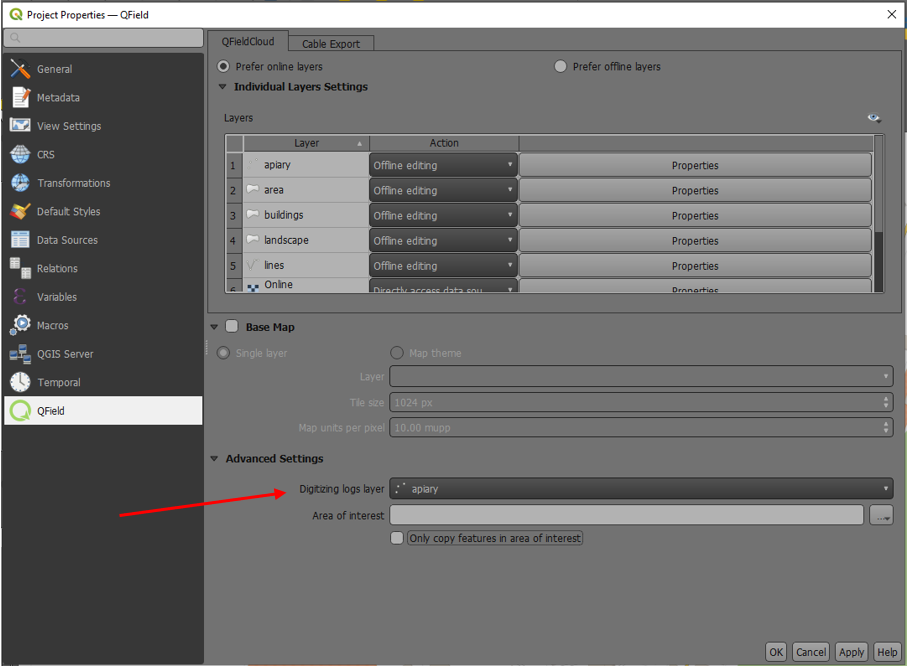
Vertex log
It is possible to setup a log layer of the collected vertices.
This allows to keep track of meta data for each vertex like GNSS quality attributes and more.
To set this up, a point layer can be added to the project and attributes configured to store this information.
Then the user assigns the role “digitizing logger” on a point layer.
Go to QFieldSync –> project Properties
The layer fields must have default value with GNSS variables.
Accuracy requirement
A minimum desired accuracy for measurements can be defined.
The quality will be reported in three classes, bad (red), ok (yellow) and excellent (green).
These colors will show up as a dot on top of the GNSS button.
The thresholds can be defined in the positioning settings.
If the Enable accuracy requirement setting is activated, a user will not be able to collect
new measurements with the cursor snapped to the position with an accuracy value which is bad (red).
Altitude
Antenna height compensation
The height of the antenna pole in use can be defined in the settings.
Any measured altitude will be corrected by this value.
Altitude correction / vertical grid shift
Altitude values can be corrected with vertical grid shift files to calculate orthometric height
Vertical grid shift files have to be made available to QField by putting them into the QField base folder (<external storage>/QField/proj).
Once the grid shift file is placed there it is available in QField in the Positioning settings under Vertical grid shift in use.
If you are using altitude correction and an external bluetooth connected antenna consider turning Use orthometric altitude from device off.