Outdated documentation
The latest documentation was moved to docs.qfield.org
GNSS e medição de precisão
O Qfield consegue usar o sistema interno GNSS GNSS (Sistemas de Satélites Globais de Navegação, como GPS, GLONASS, Galileo ou Beidou). QField também consegue ligar a antenas externas através de bluetooh e diretamente integrar a sua informação NMEA.
Indicador de qualidade
Variáveis adicionais
Pode aceder à informação de posicionamento através de variáveis de expressão adicionar. Este apenas estará disponível quando o posicionamento está ativo.
Estas variáveis são normalmente usadas como valores padrão para campos permitindo registar a qualidade das medições individuais dos pontos.
- @position_source_name
- The name of the device that gave location information as reported by the sensor. To differenciate between internal and external sensor. If the position is manually set, and the position is not snapped to the cursor, the source name is «manual». In case the cursor is not snapped to the position, all other variables will be null, if you need this, use the ``gnss_`` variables instead.
- @position_quality_description
- A human readable and translated string for the quality as reported by the sensor. E.g. «Fixed RTK». It is only available when the crosshair is snapped to the sensor.
- E
- IE
- @position_coordinate
- A point with the coordinate in WGS84. Lon, Lat, Altitude as delivered by the sensor. It is only available when the crosshair is snapped to the sensor.
- x(@position_coordinate)
- IE
- @position_horizontal_accuracy
- The horizontal accuracy of the coordinate (in meters) as reported by the sensor. It is only available when the crosshair is snapped to the sensor.
- IE
- @position_timestamp
- The timestamp of the position in UTC as reported by the sensor. It is only available when the crosshair is snapped to the sensor.
- IE
- @position_direction
- The direction of movement in degrees from true north as reported by the sensor. It is only available when the crosshair is snapped to the sensor.
- IE
- @position_ground_speed - Velocidade (em m/s) como reportado pelo sensor. Apenas está disponível quando o alvo está atraído ao sensor. - IE
- @position_magnetic_variation - O ângulo entre a componente horizontal do campo magnético e o norte verdadeiro, em graus. Também conhecida como declinação magnética. Um valor positivo indica uma direção no sentido horário do norte verdadeiro e um valor negativo indica uma direção no sentido anti-horário. Apenas está disponível quando o alvo está atraído ao sensor. - IE
- @position_vertical_accuracy - Precisão vertical do par de coordenadas (em metros) como reportado pelo sensor. Apenas está disponível quando o alvo está atraído ao sensor. - IE
- @position_3d_accuracy
- The 3 dimensional accuracy of the coordinate (in meters), 3D-RMS as reported by the sensor. It is only available when the crosshair is snapped to the sensor.
- IE
- @position_vertical_speed
- The vertical speed (in m/s) as reported by the sensor. It is only available when the crosshair is snapped to the sensor.
- IE
- @position_pdop
- Position dilution of precision as reported by the sensor. It is only available when the crosshair is snapped to the sensor.
- E
- @position_hdop
- Horizontal dilution of precision as reported by the sensor. It is only available when the crosshair is snapped to the sensor.
- E
- @position_vdop
- Vertical dilution of precision as reported by the sensor. It is only available when the crosshair is snapped to the sensor.
- E
- @position_number_of_used_satellites - Número de satélites como reportado pelo sensor. Apenas está disponível quando o alvo está atraído ao sensor. - E
- @position_used_satellites - A lista de satélites em uso (pri) como reportado pelo sensor. Apenas está disponível quando o alvo está atraído ao sensor. - array_count(@position_used_satellites) - E
- @position_fix_status_description
- The GPS Fix Status «NoData», «NoFix», «Fix2D» or «Fix3D» as reported by the sensor. It is only available when the crosshair is snapped to the sensor.
- E
- @position_fix_mode
- Fix mode (where “M” = Manual, forced to operate in 2D or 3D or “A” = Automatic, 3D/2D) as reported by the sensor. It is only available when the crosshair is snapped to the sensor.
- E
Todos @position_* variáveis com correspondência das variáveis @gnss_* . As variáveis gnss reportam sempre os valores do sensor gnss, mesmo quando o alvo não está atraído.
- Exemplos:
- when the crosshair is snapped to the sensor
- @gnss_horizontal_accuracy –> The horizontal accuracy of the coordinate (in meters) as reported by the sensor.
- @position_horizontal_accuracy –> The horizontal accuracy of the coordinate (in meters) as reported by the sensor.
- @position_source_name –> sensor name.
- when the crosshair is manually moved
- @gnss_horizontal_accuracy –> The horizontal accuracy of the coordinate (in meters) as reported by the sensor.
- @position_horizontal_accuracy –> The value is NULL.
- @position_source_name –> The value is manual.
I: Posição da Fonte Interna E: Posição da Fonte Externa (NMEA)
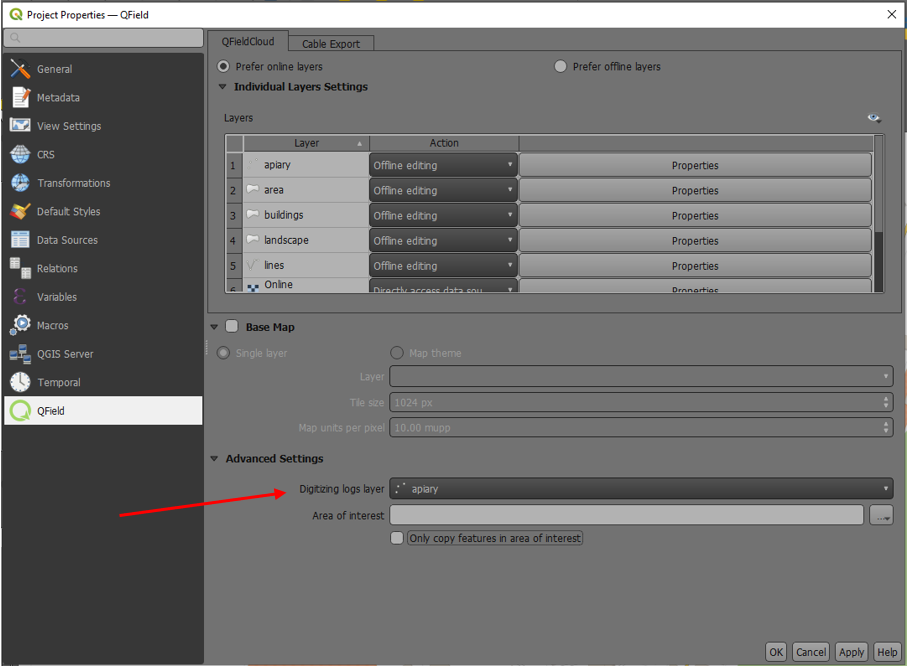
Registo dos vértices
É possível configurar uma camada de registos dos vértices recolhidos. Isso permite acompanhar os metadados de cada vértice, como atributos de qualidade GNSS e muito mais. Para configurar isso, uma camada de pontos pode ser adicionada ao projeto e os atributos configurados para armazenar essas informações.
Depois o utilizador associa a função de «registo de digitalização» numa camada de pontos.
Vá a QFieldSync –> Propriedades do projeto
Os campos da camada tem de ter o valor padrão com as variáveis GNSS.
Requirimentos de precisão
Uma precisão mínima desejada para medições pode ser definida. A qualidade será relatada em três classes, mau (vermelho), ok (amarelo) e excelente (verde). Essas cores aparecerão como um ponto no topo do botão GNSS.
Os limiares pode ser definidos nas configurações de posicionamento.
Se a configuração «Ativar requisito de precisão» estiver ativada, um utilizador não poderá recolher novas medições com o cursor encaixado na posição com um valor mau de precisão (vermelho).
Altitude
Compensação da altura da antena
A altura do poste da antena em uso pode ser definido nas configurações. Qualquer altitude medida irá ser corrigida por este valor.
Correção de altitude / grelha de transformação vertical
Os valores de altitude podem ser corrigidos com ficheiros de grelhas de transformação vertical para calcular a altura ortométrica
Os ficheiros de grelhas de transformação vertical podem ficar disponíveis no QField colocando-as na pasta base do QField (<external storage>/QField/proj).
Once the grid shift file is placed there it is available in QField in the Positioning settings under Vertical grid shift in use.
Se está a usar a correção de altitude e uma antena externa ligada considere desligar a opção Usar altitude ortométrica do dispositivo.