Outdated documentation
The latest documentation was moved to docs.qfield.org
GNSSと高精度測量
QField は内蔵の GNSS(GPS、GLONASS、Galileo、Beidou などの全地球測位衛星システム)を利用することができます。また、QField は Bluetooth で外部アンテナに接続し、その NMEA ストリームを直接使用することもできます。
品質指標
追加の変数
追加の式の変数を使用して、測位情報にアクセスすることができます。これらは、GNSS測位が有効になっている場合にのみ利用可能になります。
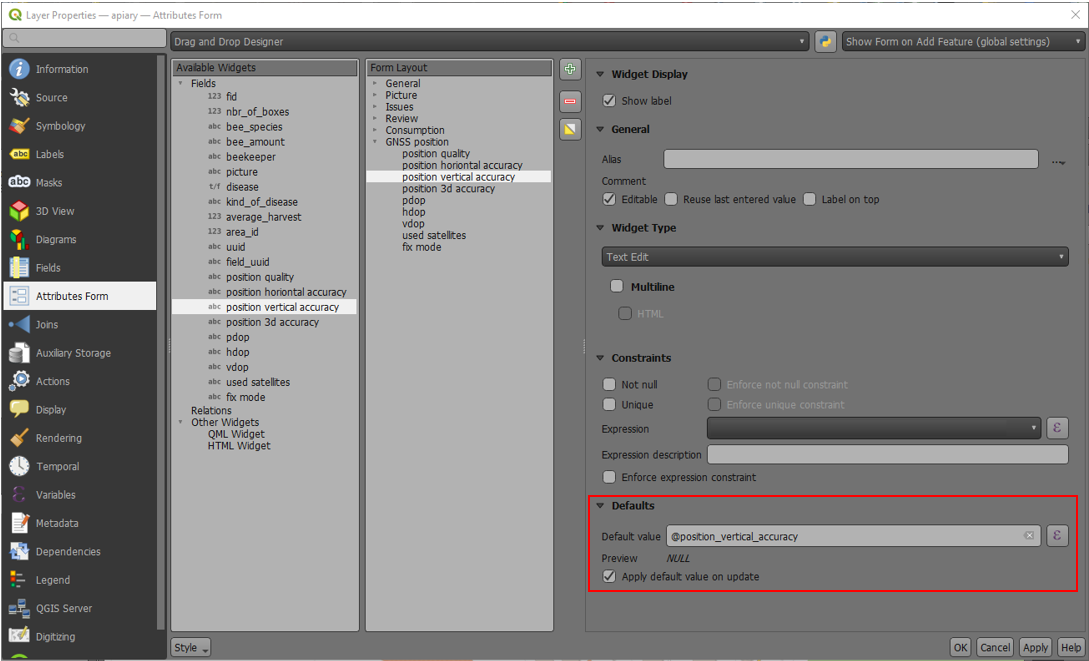
これらの変数は、個々の測定地点の品質を把握するためのフィールドのデフォルト値としてよく使われます。
- @position_source_name - 内部センサーと外部センサーを区別するためのセンサーから取得した位置情報を提供したデバイスの名前です。座標位置が手動で設定されていて、その位置がカーソルにスナップされていない場合、ソース名は「manual」となります。カーソルが座標位置にスナップされていない場合、他のすべての変数はNULLとなります。必要であれば、代わりに ``gnss_`` 変数を使用してください。
- @position_quality_description - センサーからの情報を人間が読めるように変換された文字列。 例:「Fixed RTK」。十字線がセンサーにスナップされる場合のみ利用できます。 - E
- @position_coordinate - WGS84の座標を持つ点。センサーから取得された経度、緯度、高度。十字線がセンサーにスナップされる場合のみ利用できます。 - x(@position_coordinate) - IE
- @position_horizontal_accuracy - センサーによって取得した座標の水平精度(メートル単位)。十字線がセンサーにスナップされる場合のみ利用できます。 - IE
- @position_timestamp - センサーにより取得した座標のUTC時間のタイムスタンプ。十字線がセンサーにスナップされる場合のみ利用できます。 - IE
- @position_direction - センサーにより取得した度単位での真北からの移動方向。十字線がセンサーにスナップされる場合のみ利用できます。 - IE
- @position_ground_speed - センサーで取得した対地速度(m/s)。十字線がセンサーにスナップされる場合のみ利用できます。 - IE
- @position_magnetic_variation - 磁場の水平成分と真北の間の度単位の角度。 磁気偏角とも呼ばれます。 正の値は真北から時計回りの方向を示し、負の値は反時計回りの方向を示します。十字線がセンサーにスナップされる場合のみ利用できます。 - - IE
- @position_vertical_accuracy - センサーによって取得した座標の垂直精度(メートル単位)。十字線がセンサーにスナップされる場合のみ利用できます。 - IE
- @position_3d_accuracy - センサーによって取得した座標の3次元精度(メートル単位)、3D-RMS。十字線がセンサーにスナップされる場合のみ利用できます。 - IE
- @position_vertical_speed - センサーで取得した垂直速度(m/s)。十字線がセンサーにスナップされる場合のみ利用できます。 - IE
- @position_pdop - センサーで取得した位置精度劣化度。 十字線がセンサーにスナップされる場合のみ利用できます。 - E
- @position_hdop - センサーで取得した水平精度劣化度。 十字線がセンサーにスナップされる場合のみ利用できます。 - E
- @position_vdop - センサーで取得した垂直精度劣化度。 十字線がセンサーにスナップされる場合のみ利用できます。 - E
- @position_number_of_used_satellites - センサーから取得した衛星の数。十字線がセンサーにスナップされる場合のみ利用できます。 - E
- @position_used_satellites - センサーから取得した使用中の衛星の一覧(pri)。十字線がセンサーにスナップされる場合のみ利用できます。 - array_count(@position_used_satellites) - E
- @position_fix_status_description - センサーから取得されたGPS固定のステータス 「NoData」、「NoFix」、「Fix2D」もしくは「Fix3D」。十字線がセンサーにスナップされる場合のみ利用できます。 - E
- @position_fix_mode - センサーから取得した固定モード ('M' = 手動、2Dか3Dに操作で強制される。 もしくは 'A' = 自動, 3D/2D)。十字線がセンサーにスナップされる場合のみ利用できます。 - E
すべての @position_* 変数には対応する @gnss_* 変数があります。gnss 変数は、十字線がスナップされていない場合でも、常に GNSSセンサーの値を取得します。
- 例:
- 十字線がセンサーにスナップされる場合 - @gnss_horizontal_accuracy --> センサーによって取得した座標の水平精度(メートル単位) - @position_horizontal_accuracy --> センサーによって取得した座標の水平精度(メートル単位) - @position_source_name --> センサー名
- 十字線が手動で移動された場合 - @gnss_horizontal_accuracy --> センサーによって取得した座標の水平精度(メートル単位)。 - @position_horizontal_accuracy --> 値は`NULL`になる。 - @position_source_name --> 値は`manual`になる。
I: 内部の測位情報 E: 外部 (NMEA) の測位情報
頂点のログ
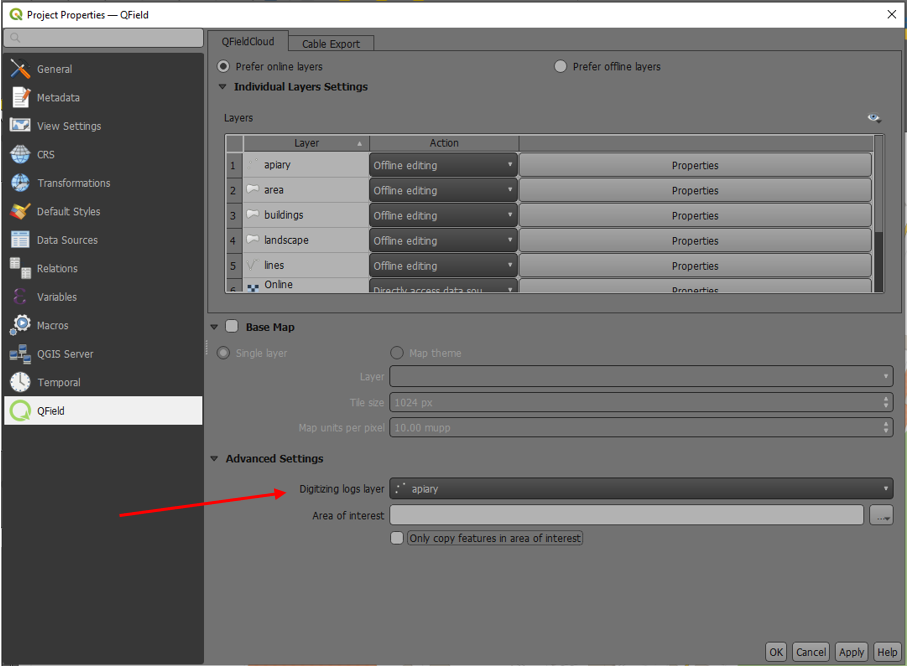
収集した頂点のログのレイヤーを設定することが可能です。これにより、GNSSの品質の属性などの各頂点のメタデータを記録することができます。これを設定するには、プロジェクトにポイントレイヤーを追加し、この情報を保存するための属性を設定します。
そして、ユーザーにポイントレイヤーへの「デジタイジングロガー」という役割を割り当てます。
QFieldSync --> プロジェクトプロパティへと進みます。
レイヤーのフィールドは、GNSS変数のデフォルト値を持つ必要があります。
高精度測位に必要なこと
測位に必要な最低限の精度を定義することができます。精度の質は、悪い(赤)、良い(黄)、とても良い(緑)の3つのクラスで報告されます。これらの色は、GNSSボタンの上にドットで表示されます。
しきい値は、GNSS測位の設定で定義できます。
高精度測位に必要 な設定が有効になっていると、精度の値が悪い(赤)位置にカーソルがスナップされた状態では、新しい測位を行うことができません。
高度
アンテナの高さ補正
使用するアンテナポールの高さは、設定で定義できます。測位された高度は、この値で補正されます
高度補正/垂直方向のグリッドシフト
高度の値は、垂直方向のグリッドシフトファイルで補正して、正距方位を算出することができます。
垂直方向のグリッドシフトファイルは、QField のベースフォルダ(<external storage>/QField/proj)に入れて、QField で利用できるようにする必要があります。
Once the grid shift file is placed there it is available in QField in the Positioning settings under Vertical grid shift in use.
高度補正を行う場合や、Bluetooth接続の外部アンテナを使用している場合は、デバイスからの正距方位の使用 をオフにすることを検討してください。